
ソローモデルは、マクロ経済学における経済成長理論の一つで、1956年にロバート・ソローによって提唱されたものです。このモデルは、経済がどのように成長し、時間とともにどのように変化するかを理解するためのフレームワークを提供します。
ソローモデルとは?計算式や定常状態をわかりやすく解説!!
標準的なソローモデルでは\(0<\alpha<1\)とし、資本の限界生産力が逓減すると仮定します。正の初期資本からは、効率労働1単位あたりの資本が定常状態へ近づきます。
貯蓄率の上昇は定常状態の資本量と生産水準を引き上げますが、1人あたり生産の長期成長率を恒久的に引き上げるわけではありません。標準モデルの長期成長率は、外生的に与えた技術進歩率によって決まります。
経済成長を分析するために広く利用されているソローモデルは、資本蓄積、労働人口の成長、技術進歩といった要素を組み合わせて、経済全体の成長を説明します。このモデルは、特に長期的な経済成長の動向を捉えるのに適しており、多くの政策立案や経済学的予測に役立てられています。
ソローモデルの離散的なモデリング
ソローモデルは標準的には生産関数としてコブダグラス型生産関数を採用してモデリングします。
今回は時間に関するパラメータが離散的な状況を考えることにします。
生産関数を次のように与えます。
\begin{align*} Y_t = K_t^\alpha \left(A_t L_t \right)^{1-\alpha} \end{align*}
そして、遷移式を次のように指定します。
\begin{align*} \begin{cases} K_{t+1} = (1-\delta)K_t + sY_t \\ A_{t+1} = (1+g)A_t \\ L_{t+1} = (1+n) L_t \end{cases} \end{align*}
ここで、
\(Y_t\)は時刻\(t\)における総生産量、
\(K_t\)は時刻\(t\)における資本、
\(A_t\)は時刻\(t\)における技術水準、
\(L_t\)は時刻\(t\)における労働力、
\(\alpha\)は資本分配率を表すパラメータです。標準的な仮定として\(0<\alpha<1\)とし、資本の限界生産力が逓減する状況を考えます。
\(\delta\)は資本の減耗率、
\(s\)は生産に対する貯蓄率、
\(g\)は技術の進歩を制御するパラメータ、
\(n\)は労働力の増減を制御するパラメータです。
ソローモデルについて誰でも直ちにわかること
ソローモデルについて誰でも直ちにわかることをいくつか考察してみましょう。
ここは、間違いなく誰でもわかるので読み飛ばしても大丈夫です。
ソローモデルにおいては、生産関数が特定の関係性を示しています。
具体的には、資本量 \(K_t\) が増加すると、生産量 \(Y_t\) も大きくなります。ただし\(0<\alpha<1\)なので、資本を増やしたときの生産量の増え方は次第に小さくなります。これが資本の限界生産力逓減です。
また、技術水準 \(A_t\) と労働力 \(L_t\) が増加する場合も同様です。
技術水準が高いほど、生産効率が向上し、同量の資本と労働に対してより多くの生産物を生み出すことができます。
一方、労働力が多ければ、それだけで生産可能な量も増加します。
したがって、\(A_t\) や \(L_t\) が増えれば、それに応じて \(Y_t\) も大きくなると考えられます。
これらの関係性は、ソローモデルが少なくともトンデモモデルではないということを意味しています。
もし、資本量が増加するほど\(Y_t\)が減少するようなモデリングになっていれば、トンデモモデルだったことでしょう。
ソローモデルにおける定常状態の計算: 効率労働あたりの資本
ソローモデルを考察するために、適当に式を変形したりしてみましょう。天下り的ですが、
\begin{align*} k_t := \frac{K_t}{A_t L_t}\end{align*}
という記号を導入してみます。
\(A_t, L_t\)を掛け算した\(A_t L_t\)という値は、効率労働と言われます。従って、\(k_t\)は効率労働あたりの資本と言われます。
すると、ソローモデルの式は次のように変形できます。
\begin{align*} Y_t = K_t^\alpha \left(A_t L_t \right)^{1-\alpha} = k_t^\alpha A_t L_t \end{align*}
また、遷移式から得られる情報がないかあれこれと変形を試してみましょう。
\begin{align*} k_{t+1} &= \frac{K_{t+1}}{A_{t+1} L_{t+1}}
\\&= \frac{(1-\delta)K_t + sY_t}{(1+g)A_t (1+n)L_t}
\\&=\frac{(1-\delta)K_t}{(1+g)A_t (1+n)L_t} + \frac{s Y_t}{(1+g)A_t (1+n)L_t}
\\&= \frac{1 – \delta}{(1+g)(1+n)}k_t + \frac{sk_t^\alpha A_t L_t }{(1+g)A_t (1+n)L_t}
\\&= \frac{1 – \delta}{(1+g)(1+n)}k_t + \frac{s }{(1+g)(1+n)}k_t^\alpha \end{align*}
このような式が得られたならば、初期時刻\(t=0\)において\(k_0\)が絶妙な値であるならば、
\begin{align*} k_0 = k_1 = k_2 = \cdots \end{align*}
が成り立つようにできることがわかるでしょう。
この絶妙な値を求めるためには、
\begin{align*} \kappa = \frac{1 – \delta}{(1+g)(1+n)} \kappa + \frac{s }{(1+g)(1+n)} \kappa ^\alpha \end{align*}
を満たす\(\kappa\)を求めればよいことがわかります。
\(\kappa=0\)のとき、実際にこの式が成り立つことが確かめられます。
つまり、\(K_0 =0\)であれば、\(k_0 = k_1 = k_2 \cdots = 0\)です。
\(\kappa \neq 0\)であるようなケースを探してみましょう。
\begin{align*} \kappa = \frac{1 – \delta}{(1+g)(1+n)} \kappa + \frac{s }{(1+g)(1+n)} \kappa ^\alpha\end{align*}
の両辺を\(\kappa\)で割ると、
\begin{align*} 1 = \frac{1 – \delta}{(1+g)(1+n)} + \frac{s }{(1+g)(1+n)} \kappa ^{\alpha – 1}\end{align*}
ですので、\((1+g)(1+n)\)をかけると、
\begin{align*} (1+g)(1+n) = 1- \delta + s \kappa ^{\alpha – 1} \end{align*}
が得られます。つまり、
\begin{align*} \kappa^{\alpha – 1} &= \frac{(1+g)(1+n) – (1 – \delta) }{s}
\\&= \frac{g + n + gn + \delta }{s} \end{align*}
を解いて、
\begin{align*} \kappa = \left( \frac{g + n + gn + \delta }{s}\right)^{\frac{1}{\alpha – 1}} \end{align*}
と求められます。
従って、次のような命題が得られます。
\begin{align*} k_0 = \left( \frac{g + n + gn + \delta }{s}\right)^{\frac{1}{\alpha – 1}} \end{align*}
であるならば、
\begin{align*} k_0 = k_1 = k_2 = \cdots = \left( \frac{g + n + gn + \delta }{s}\right)^{\frac{1}{\alpha – 1}} \end{align*}
が成り立つ。
もちろん、次のことも同時に言えます。
時刻\(T\)について
\begin{align*} k_T = \left( \frac{g + n + gn + \delta }{s}\right)^{\frac{1}{\alpha – 1}} \end{align*}
が成り立つならば、任意の\(t \geq T\)に対して、
\begin{align*} k_t = \left( \frac{g + n + gn + \delta }{s}\right)^{\frac{1}{\alpha – 1}} \end{align*}
が成り立つ。
定常状態への収束をグラフで確認してみましょう
では、定常状態へ収束するかどうかを調べるために、グラフをプロットしてみましょう。
\(\alpha = 0.25\)
\(\delta = 0.05\)
\(s = 0.25\)
\(g = 0.05\)
\(n = 0.1\)
という設定で、
\begin{align*} k_{t+1} = \frac{1 – \delta}{(1+g)(1+n)}k_t + \frac{s }{(1+g)(1+n)}k_t^\alpha \end{align*}
と、
\begin{align*} k_{t + 1} = k_t\end{align*}
のグラフをそれぞれプロットしてみます。
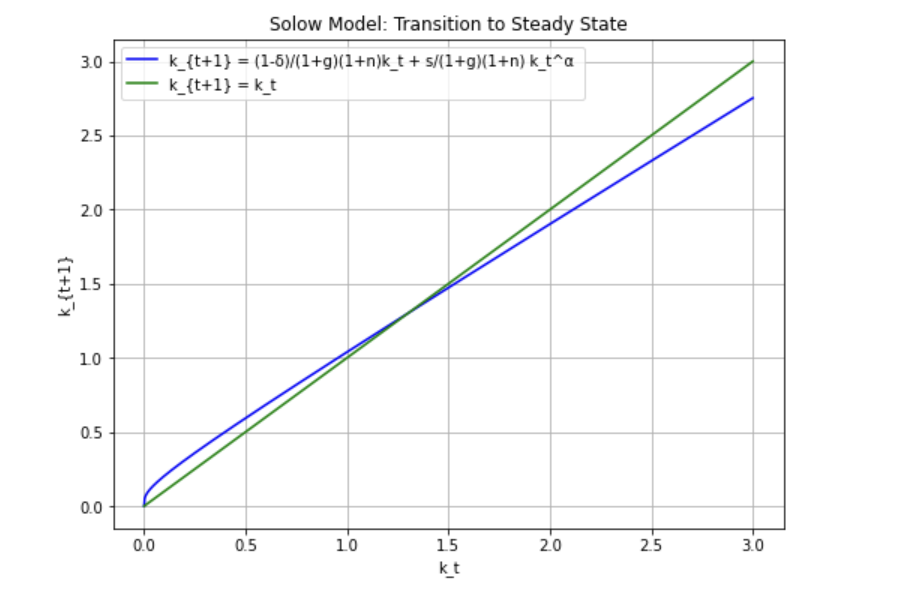
力学系における蜘蛛の巣図法の考え方(用語自体は知らなくても大丈夫です)により、正の初期値\(k_0>0\)から始めると、この設定では\(k_t\)が正の定常状態へ収束していくことを確認できます。
\(k_0=0\)なら資本も生産も0のままなので、正の定常状態へは移りません。初期値の条件を区別することが大切です。
ソローモデルの連続的なモデリング
ここまでは各期ごとに値が変わる離散時間モデルを考えました。次は、時間が連続的に進む別のモデルとして、資本・技術・労働の変化率を微分方程式で定義します。単なる記号の置き換えではなく、下記の式を連続時間版の仮定として置きます。
生産関数を次のように与えます。
\begin{align*} Y(t) = K(t)^\alpha \left(A(t) L(t) \right)^{1-\alpha} \end{align*}
そして、遷移式を次のように指定します。
\begin{align*} \begin{cases} \dot K(t) = -\delta K(t) + sY(t) \\ \dot A(t) = g A(t) \\ \dot L(t) = n L(t) \end{cases} \end{align*}
ここで、
\(Y(t)\)は時刻\(t\)における総生産量、
\(K(t)\)は時刻\(t\)における資本、
\(A(t)\)は時刻\(t\)における技術水準、
\(L(t)\)は時刻\(t\)における労働力、
\(\alpha\)は資本分配率で、ここでも\(0<\alpha<1\)とします。
\(\dot K(t),\dot A(t),\dot L(t)\)は、すべて\(t\)に関する微分を表しています。
\(\delta\)は資本の減耗率、
\(s\)は生産に対する貯蓄率、
\(g\)は技術の進歩を制御するパラメータ、
\(n\)は労働力の増減を制御するパラメータです。
離散的な場合と同様に
\begin{align*} k(t) = \frac{K(t)}{A(t)L(t)} \end{align*}
という記号を導入することにしましょう。効率労働あたりの資本です。
また、
\begin{align*} y(t) = \frac{Y(t)}{A(t)L(t)} \end{align*}
という記号も導入しましょう。効率労働あたりの生産です。
徐に、\(k\)を微分して、\(k\)の変化が何に依存するかを確認してみましょう。
\begin{align*} \dot k(t) &= \frac{\dot K(t)A(t)L(t) – K(t)\dot A(t)L(t) – K(t)A(t) \dot L(t) }{(A(t)L(t))^2}
\\&= \frac{\dot K(t)}{A(t)L(t)} – \frac{K(t)}{A(t)L(t)} \frac{\dot L(t)}{L(t)}- \frac{K(t)}{A(t)L(t)} \frac{\dot A(t)}{A(t)}
\\& =\frac{\dot K(t)}{A(t)L(t)} – \frac{K(t)}{A(t)L(t)} n- \frac{K(t)}{A(t)L(t)} g
\\&= \frac{-\delta K(t) + sY(t)}{A(t)L(t)} – k(t) n- k(t)g
\\&= \frac{-\delta K(t)}{A(t)L(t)} + \frac{sY(t)}{A(t)L(t)} – k(t) n- k(t)g
\\&= -\delta k(t) + s y(t) – n k(t) – g k(t) \end{align*}
となります。すなわち、
\begin{align*} \dot k(t) = s y(t) – (\delta + n + g) k(t) \end{align*}
となります。この式が意味することは、
\begin{align*} s y(t) = (\delta + n + g) k(t) \end{align*}
であるならば、\(\dot k(t) = 0\)となり、\(k(t)\)は時間が経過しても変化しないということになります。
\(sy(t)\)は効率労働あたりの投資量であるため、次のような帰結を得られます。
ソローモデルに従う世界において、
効率労働あたりの投資量が、\((\delta + n + g) k(t)\)と一致するならば、
効率労働あたりの資本は時間に依らず変化しない。
ソローモデルにおける貯蓄率の変化
ソローモデルに従う世界において、貯蓄率の変化が何を引き起こすかを考えてみましょう。
まず初めに、
\begin{align*} y(t) &= \frac{Y(t)}{A(t)L(t)} \\&= \frac{(K(t))^\alpha (A(t)L(t))^{1-\alpha}}{A(t)L(t)}
\\&= \left(\frac{K(t)}{A(t)L(t)} \right)^\alpha
\\&= (k(t))^{\alpha} \end{align*}
であることを確認しておきましょう。従って、
\begin{align*} s y(t) = s (k(t))^\alpha \end{align*}
です。
\(\dot k(t)=0\)となるための条件
\begin{align*}s y(t)=(\delta+n+g)k(t)\end{align*}
は
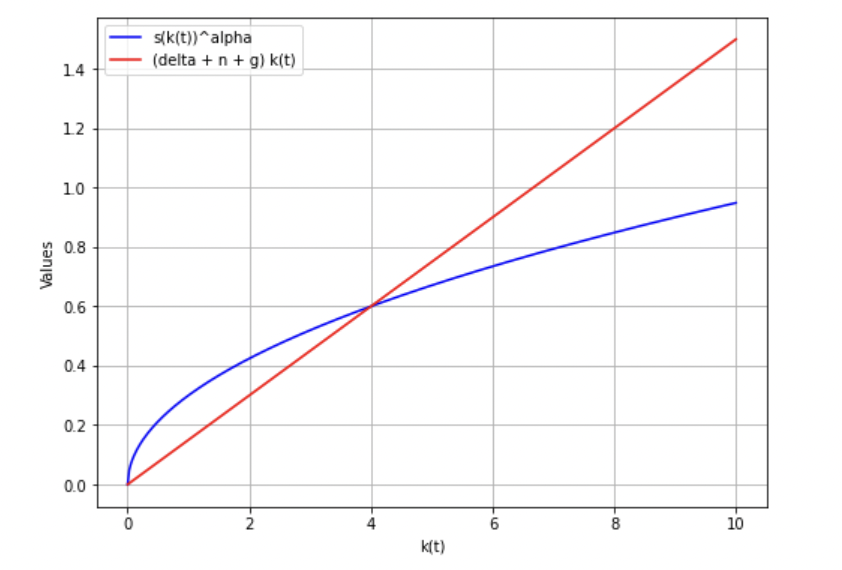
\begin{align*}s(k(t))^\alpha=(\delta+n+g)k(t)\end{align*}
と書き換えることができます。
青線を\(s(k(t))^\alpha\)、
赤線を\((\delta+n+g)k(t)\)としてグラフに描画してみましょう。
交点が条件を満たす\(k(t)\)です。
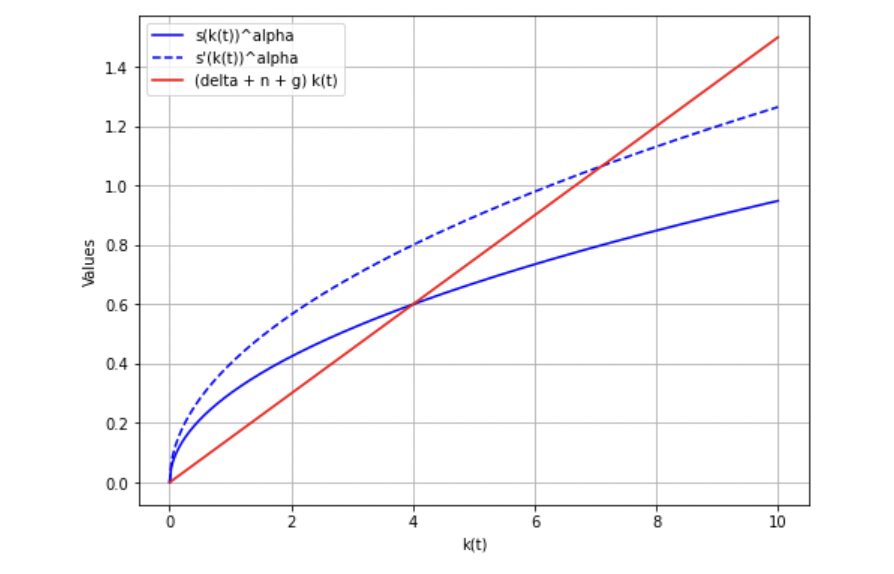
貯蓄率\(s\)が\(s^\prime>s\)へ上昇したとします。
新たに青点線で\(s^\prime(k(t))^\alpha\)を表すことにします。
すると、交点を与える\(k(t)\)の値が右へ移動することがわかります。
\(k(t)\)が定常であった状態
\begin{align*} \dot k(t) = s y(t) – (\delta + n + g) k(t) = 0 \end{align*}
から、\(s\)が上昇し, \(s^\prime\)になると、
\begin{align*} \dot k(t) = s^\prime y(t) – (\delta + n + g) k(t) > 0 \end{align*}
このようになり、\(k(t)\)は上昇していく状態になります。
その後、再び\(k(t)\)が定常になります。
貯蓄率が上がると、移行期間には効率労働あたり資本と生産が成長します。しかし新しい定常状態へ到達すると、効率労働あたりの成長は再び0になります。したがって、貯蓄率の上昇は長期的な生産水準を高めますが、標準的なソローモデルの長期成長率を永久に高める効果ではありません。
マクロ経済学の定番参考図書
※以下にはアフィリエイトリンクが含まれます。
理論と実証のバランスを重視し、最先端の理論で経済問題を解き明かす。マクロ経済学を本当に理解したい学部上級、大学院生必携の決定版テキスト。
https://www.nippyo.co.jp/shop/book/5250.html